CAN2Ethernet
If you are searching for a cheap, fast and reliable CAN interface with Ethernet connection consider using CAN-CAN Interface
or the Banana Pi with integrated CAN-Controller
CAN + Raspberry Pi
Please have a look at Raspberry Forum
Summary
Efforts connecting a MCP2515 CAN controller to Raspberry Pi. Please note: This is not ment to be a description for Linux beginners.
The combination of RPi and MCP2515 isn't perfect - you need some time to get a reliable setup working.
Wiring
P1-01 3V3 -> MCP2515 VCC
P1-02 5V -> MCP2551 VCC
P1-06 GND -> MCP25xx GND
P1-19 GPIO10 -> MOSI
P1-21 GPIO9 -> MISO
P1-22 GPIO25 -> MCP2515 INT
P1-23 GPIO11 -> SCK
P1-24 GPIO8 -> CS0

Rasperry Pi GPIOs use 3V3 as the MCP2515 does. The tranceiver uses 5V - the R1/R2 combination is a voltage divider.
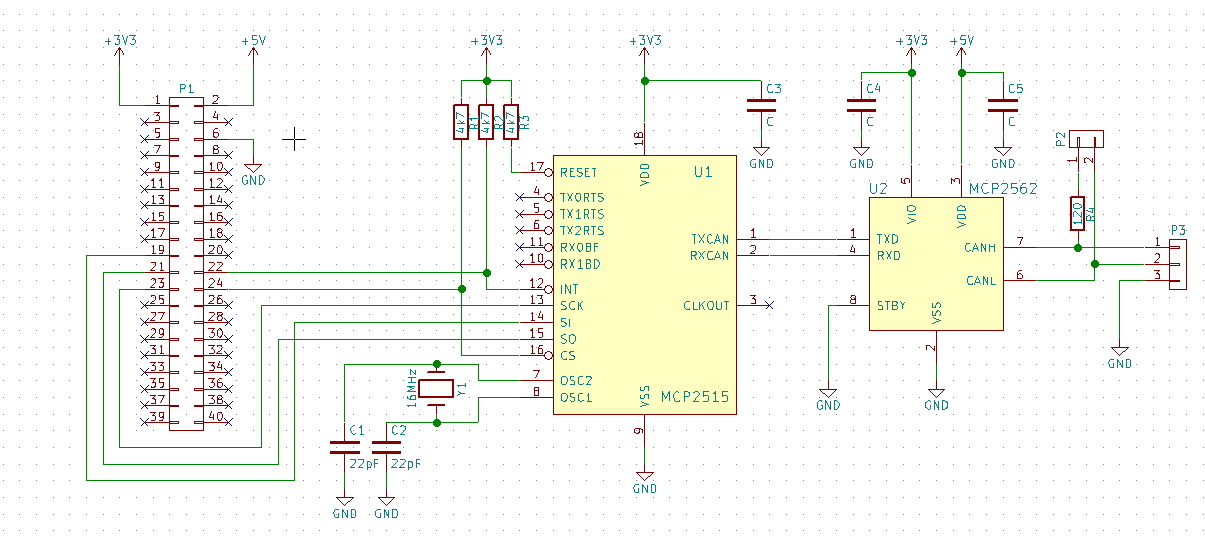
Improved Design
I've seen commercial products based on the schematic above. Strange, because these days you should use a MCP2562 instead of the (not recommend for new designs) MCP2551. The MCP2562 can operate with two supply voltages (e.g. 3V3 IO / 5V CANBUS) which avoids the two resistors R1/R2 and is more reliable. Here the new design:
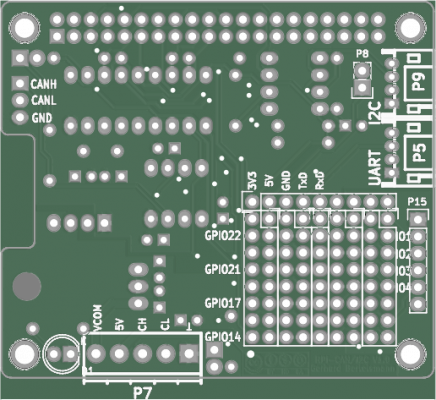
If you want to try this design: +-10 PCBs from Dirtypcbs.com
CAN test
Make sure that you have all necessary modules installed
#
spi-bcm2708
can
can-dev
can-raw
mcp251x
# Maerklin Gleisbox (60112 and 60113) uses 250000
# loopback mode for testing
ip link set can0 up type can bitrate 125000 loopback on
root@raspberrypi ~ # dmesg
[ 394.151290] bcm2708_spi bcm2708_spi.0: SPI Controller at 0x20204000 (irq 80)
[ 465.325599] can: controller area network core (rev 20090105 abi 8)
[ 465.325968] NET: Registered protocol family 29
[ 523.007604] CAN device driver interface
[ 560.310129] can: raw protocol (rev 20090105)
[ 565.070666] can: broadcast manager protocol (rev 20090105 t)
[ 593.259813] mcp251x spi0.0: CANSTAT 0x80 CANCTRL 0x07
[ 593.266881] mcp251x spi0.0: probed
[ 638.710821] mcp251x spi0.0: CNF: 0x03 0xb5 0x01
# on second terminal
root@raspberrypi ~ # candump any,0:0,#FFFFFFFF
can0 123 [4] DE AD BE EF
can0 123 [4] DE AD BE EF
can0 123 [4] DE AD BE EF
can0 123 [4] DE AD BE EF
root@raspberrypi ~ # cansend can0 123#deadbeef
root@raspberrypi ~ # cansend can0 123#deadbeef
root@raspberrypi ~ # ip -s -d link show can0
3: can0: <NOARP,UP,LOWER_UP,ECHO> mtu 16 qdisc pfifo_fast state UNKNOWN mode DEFAULT qlen 10
link/can
can <LOOPBACK> state ERROR-ACTIVE restart-ms 0
bitrate 125000 sample-point 0.875
tq 500 prop-seg 6 phase-seg1 7 phase-seg2 2 sjw 1
mcp251x: tseg1 3..16 tseg2 2..8 sjw 1..4 brp 1..64 brp-inc 1
clock 8000000
re-started bus-errors arbit-lost error-warn error-pass bus-off
0 0 0 0 0 0
RX: bytes packets errors dropped overrun mcast
8 2 0 0 0 0
TX: bytes packets errors dropped carrier collsns
8 2 0 0 0 0
root@raspberrypi ~# cat /proc/interrupts
CPU0
3: 192391 ARMCTRL BCM2708 Timer Tick
52: 2 ARMCTRL BCM2708 GPIO catchall handler
65: 2 ARMCTRL ARM Mailbox IRQ
66: 1 ARMCTRL VCHIQ doorbell
75: 14889016 ARMCTRL dwc_otg, dwc_otg_hcd:usb1
77: 11994 ARMCTRL bcm2708_sdhci (dma)
80: 58 ARMCTRL bcm2708_spi.0
83: 22 ARMCTRL uart-pl011
84: 21565 ARMCTRL mmc0
110: 2 GPIO mcp251x
Err: 0
Misc
Alternative MCP2515 module
Faster?!
Slightly modified:
Look at:mcp2515.c
Reduced to the max
Impressum: